









Konsultacje dotyczące produktu
Twój adres e-mail nie zostanie opublikowany. Wymagane pola są zaznaczone *



Przewodnik po szczotkowanych silnikach prądu stałego: jak to działa, najważniejsze dane techniczne i kiedy ich używać
Jun 04,2026
Motoreduktory prądu stałego: kompletny przewodnik dla kupujących dotyczący typów, specyfikacji i wyboru
May 28,2026
Wyjaśnienie motoreduktora krokowego: rodzaje, moment obrotowy i sposób wyboru właściwego
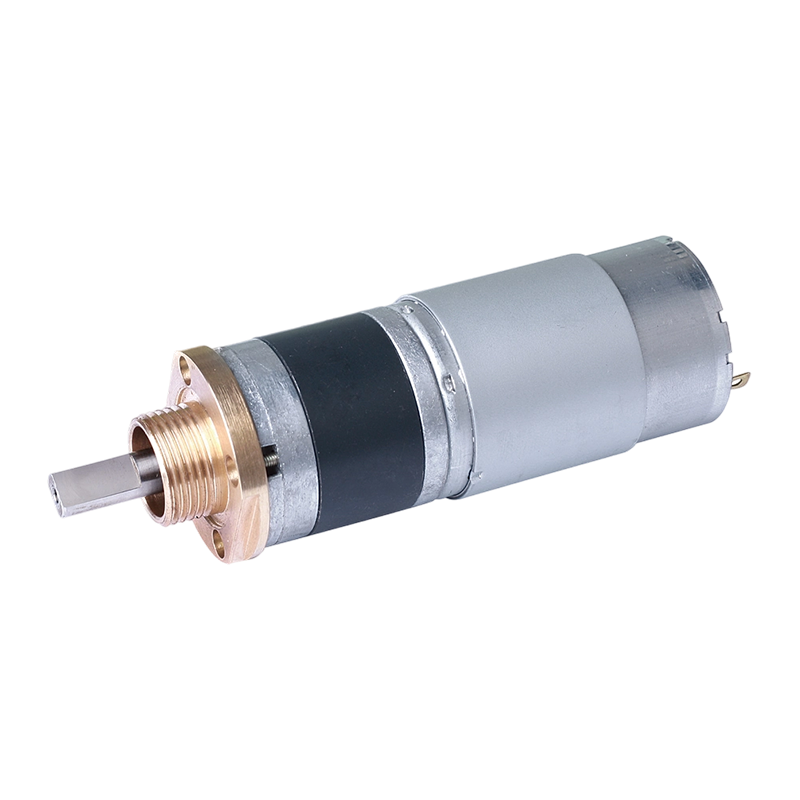
May 21,2026Motoreduktor prądu stałego to silnik elektryczny prądu stałego połączony z mechaniczną skrzynią biegów w jednym zintegrowanym zespole. Sam silnik obraca się szybko — często od 3000 do 15 000 obr./min przy napięciu znamionowym — ale większość rzeczywistych zastosowań wymaga powolnego, kontrolowanego ruchu i znacznej siły obrotowej. Skrzynia biegów rozwiązuje ten problem, zamieniając prędkość na moment obrotowy poprzez szereg zazębionych kół zębatych. W rezultacie wał wyjściowy obraca się znacznie wolniej niż wirnik silnika, ale zapewnia proporcjonalnie większy moment obrotowy dostępny na wale.
Bez skrzyni biegów mały silnik prądu stałego może z łatwością obracać łopatkę wentylatora, ale ma trudności z podniesieniem ładunku, napędem przenośnika taśmowego lub obróceniem zaworu. Przy redukcji przekładni wynoszącej, powiedzmy, 100:1, ten sam silnik, który wytwarza 5 mN·m swobodnego momentu obrotowego, dostarcza obecnie około 500 mN·m na wyjściu — minus straty spowodowane tarciem zazębienia przekładni, zwykle 5–20% w zależności od rodzaju przekładni i smarowania. To zwielokrotnienie momentu obrotowego w połączeniu z kompaktową integracją silnika i skrzyni biegów w jeden zespół sprawia, że motoreduktory prądu stałego należą do najczęściej stosowanych elementów ruchu w zastosowaniach przemysłowych, komercyjnych i konsumenckich.
Konstrukcja skrzyni biegów ma większy wpływ na wydajność, rozmiar, wydajność i hałas niż prawie jakakolwiek inna zmienna projektowa. Na rynku dominują cztery konfiguracje.
Koła zębate czołowe mają proste zęby wycięte równolegle do osi wału. Są najprostszym i najtańszym typem przekładni w produkcji, co sprawia, że silniki prądu stałego z przekładniami czołowymi są domyślnym wyborem w zastosowaniach wrażliwych na koszty. Ich główną słabością jest hałas: ponieważ cała szerokość zębów zazębia się jednocześnie na każdym styku zazębienia, koła zębate czołowe wytwarzają charakterystyczny stukot przy dużej prędkości. Sprawność jest dobra — zazwyczaj 95–98% na stopień — i dobrze znoszą umiarkowane obciążenia promieniowe. Silniki z przekładnią czołową są powszechnie stosowane w drukarkach, zabawkach, automatach sprzedających i siłownikach o niewielkim obciążeniu, gdzie cicha praca nie jest priorytetem.
Przekładnia planetarna składa się z wielu przekładni planetarnych wokół centralnego koła zębatego „słonecznego”, a wszystkie znajdują się w kole koronowym. Ponieważ obciążenie jest rozkładane jednocześnie na kilka przekładni planetarnych, silnik z przekładnią planetarną na prąd stały zapewnia bardzo wysoką gęstość momentu obrotowego w kompaktowej, współosiowej obudowie. Wał wyjściowy jest wyrównany z wałem silnika, co upraszcza instalację w układach o ograniczonej przestrzeni. Przekładnie planetarne są sztywniejsze i bardziej precyzyjne niż przekładnie zębate lub ślimakowe, co czyni je preferowanym wyborem w robotyce, pojazdach sterowanych automatycznie (AGV), wkrętakach elektrycznych i wszelkich zastosowaniach wymagających wysokiego momentu obrotowego, dokładnego pozycjonowania i długiej żywotności. Kompromisem jest koszt: produkcja przekładni planetarnych jest znacznie droższa niż przekładnie zębate czołowe lub śrubowe przy tym samym momencie obrotowym.
Przekładnia ślimakowa wykorzystuje śrubowy wał ślimakowy, który zazębia się z kołem ślimakowym pod kątem 90 stopni. Taka konfiguracja umożliwia osiągnięcie bardzo wysokich przełożeń w jednym stopniu — zwykle od 5:1 do 100:1 — i zapewnia naturalną charakterystykę samoblokowania: gdy silnik się zatrzyma, obciążenie nie może cofać przekładni. To sprawia, że silniki prądu stałego z przekładnią ślimakową idealnie nadają się do zastosowań, w których ładunek musi utrzymywać pozycję bez zasilania, takich jak otwieranie bram garażowych, windy sceniczne, siłowniki łóżek szpitalnych i bariery zabezpieczające. Głównym ograniczeniem jest wydajność: tarcie oczek przekładni ślimakowej jest wysokie, przy typowej wydajności jednostopniowej w zakresie od 50–90% w zależności od kąta wyprzedzenia, przy czym wyższe przełożenia są stopniowo mniej wydajne. Motoreduktory ślimakowe wytwarzają również znaczną ilość ciepła w ciągłych cyklach pracy pod dużym obciążeniem.
Koła zębate śrubowe mają zęby ścięte pod kątem do osi wału, więc kontakt między zębami jest stopniowy i postępujący, a nie gwałtowny. To radykalnie zmniejsza hałas i wibracje w porównaniu z przekładniami czołowymi i nieznacznie poprawia nośność ze względu na większą efektywną powierzchnię styku. Motoreduktory walcowe na prąd stały są powszechne w zastosowaniach wymagających cichszej pracy – napędach przenośników, maszynach pakujących i sprzęcie medycznym. Kombinacje śrubowo-skośne umożliwiają przesunięcie wału wyjściowego pod kątem 90 stopni w stosunku do silnika, podobnie jak w przypadku napędu ślimakowego, ale z wyższą wydajnością (zwykle 94–97% na stopień). Zwiększony nacisk osiowy generowany przez zazębienie przekładni śrubowej wymaga łożysk, które wytrzymają to obciążenie, co nieznacznie zwiększa koszt jednostkowy.
Sam element silnika prądu stałego występuje w dwóch podstawowych architekturach, a wybór między nimi znacząco wpływa na koszty, wymagania konserwacyjne, zakres prędkości i żywotność.
| Funkcja | Szczotkowany silnik z przekładnią prądu stałego | Bezszczotkowy silnik z przekładnią prądu stałego (BLDC) |
| Metoda komutacji | Mechaniczne (komutator szczotek węglowych) | Elektroniczny (ESC lub sterownik silnika) |
| Typowy okres użytkowania | 500–3 000 godzin (ograniczone zużycie szczotek) | 10 000–20 000 godzin |
| Złożoność sterowania | Proste — napięcie lub bezpośrednie PWM | Wymaga dedykowanego sterownika BLDC/ESC |
| Wydajność | 75–85% typowo | 85–95% typowo |
| Szum i zakłócenia elektromagnetyczne | Wyższa (łuk szczotkowy generuje zakłócenia elektromagnetyczne) | Niższy |
| Koszt jednostkowy | Niższy | Wyższa (sterownik silnika) |
| Typowe zastosowania | Zabawki, sprzęt AGD, automatyka oświetleniowa | Robotyka, pojazdy AGV, urządzenia medyczne, pojazdy elektryczne |
W przypadku prototypowania lub zastosowań przerywanych o niskim obciążeniu, najszybszą i najtańszą drogą do działającego systemu jest szczotkowany silnik z przekładnią prądu stałego napędzany prostym mostkiem H L298N lub TB6612FNG. W przypadku wszystkiego, co pracuje w sposób ciągły, działa w trudnych warunkach lub musi przetrwać lata w terenie bez konserwacji, bezszczotkowy motoreduktor prądu stałego – pomimo wyższych kosztów początkowych i dodatkowej elektroniki sterownika – prawie zawsze zapewnia niższy całkowity koszt posiadania.
Arkusze danych motoreduktorów prądu stałego mogą być gęste, ale pięć parametrów określa, czy silnik będzie działał w Twojej aplikacji. Zrozumienie każdego z nich pozwala uniknąć najczęstszych błędów selekcji.
Silniki przekładniowe prądu stałego są przeznaczone do określonego napięcia zasilania — najczęściej 6 V, 12 V, 24 V lub 48 V w zastosowaniach przemysłowych i hobbystycznych. Praca silnika znacznie powyżej jego napięcia znamionowego przyspiesza zużycie szczotek w typach szczotkowych, przegrzewa uzwojenia i skraca żywotność łożysk. Praca poniżej napięcia znamionowego zmniejsza dostępny moment obrotowy i może spowodować utknięcie silnika pod obciążeniem. W przypadku systemów zasilanych akumulatorowo napięcie znamionowe silnika należy dopasować do znamionowego napięcia zestawu akumulatorów przy średnim, a nie pełnym naładowaniu, aby uniknąć przepięcia w górnej części cyklu ładowania. Silnik przekładniowy 12 V DC zasilany ze świeżo naładowanego akumulatora 3S LiPo (12,6 V) jest marginalnie akceptowalny; uruchomienie go z pakietu 4S (16,8 V) szybko go zniszczy.
Prędkość bez obciążenia to prędkość obrotowa wału wyjściowego, gdy silnik pracuje przy napięciu znamionowym i przyłożonym momencie obrotowym zerowym. Pod rzeczywistym obciążeniem prędkość spada — zwykle o 10–20% przy znamionowym (ciągłym) momencie obrotowym i aż do 50% przy szczytowym momencie utyku. Obliczając, czy motoreduktor prądu stałego może poruszać obciążeniem z wymaganą prędkością, zawsze należy stosować prędkość pod obciążeniem w oczekiwanym punkcie pracy momentu obrotowego, a nie wartość bez obciążenia. Producenci czasami podają tylko prędkość bez obciążenia i moment obrotowy utknięcia; punkt pracy pod obciążeniem przypada mniej więcej pośrodku krzywej prędkości i momentu obrotowego.
Moment znamionowy (zwany także momentem ciągłym) to maksymalny moment obrotowy, jaki silnik może dostarczać przez czas nieokreślony bez przegrzania. Moment utyku to szczytowy moment obrotowy wytwarzany, gdy wał pozostaje nieruchomy — zwykle 5–10 razy większy od momentu znamionowego szczotkowego silnika z przekładnią prądu stałego. Moment utyku jest przydatny do wymiarowania sporadycznych obciążeń szczytowych (na przykład siła potrzebna do uwolnienia zakleszczonego zaworu), ale ciągła praca przy utknięciu lub w pobliżu utyku spowoduje szybkie przegrzanie silnika. Wybierz silnik, którego moment znamionowy jest co najmniej 20–30% większy od oczekiwanego momentu ciągłego obciążenia w Twojej aplikacji. Ten margines bezpieczeństwa uwzględnia zmiany tarcia, zapady napięcia i obniżenie wartości znamionowych temperatury.
Przełożenie przekładni wyraża, ile obrotów wału silnika powoduje jeden obrót wału wyjściowego. Stosunek 50:1 oznacza, że wyjście obraca się raz na każde 50 obrotów silnika. Wyższe przełożenia powodują niższą prędkość wyjściową i wyższy wyjściowy moment obrotowy. Jednak bardzo wysokie przełożenia powodują wprowadzenie większej liczby stopni przekładni, co zwiększa straty tarcia i luz — niewielki luz na wale wyjściowym przy zmianie kierunku. W przypadku zastosowań związanych z pozycjonowaniem luz jest krytyczną specyfikacją: przekładnie planetarne zazwyczaj oferują luz 0,5–3 minut łuku w gatunkach precyzyjnych, podczas gdy ekonomiczne przekładnie czołowe mogą mieć luz 1–5 stopni, co jest niedopuszczalne w przypadku wszystkiego, co wymaga powtarzalnego pozycjonowania.
Cykl pracy opisuje procent czasu pracy silnika w stosunku do odpoczynku w danym okresie cyklu. Silnik o klasie S1 (praca ciągła) może pracować przez czas nieokreślony przy obciążeniu znamionowym bez przegrzania. Wartości znamionowe S2 (praca krótkotrwała) i S3 (praca przerywana okresowa) umożliwiają wyższe poziomy mocy szczytowej, ponieważ silnik chłodzi się w okresach wyłączenia. Zawsze dopasowuj parametry znamionowe silnika do rzeczywistego cyklu pracy — silnik przystosowany do 30% cyklu pracy przegrzeje się i ulegnie awarii, jeśli będzie pracował nieprzerwanie, nawet jeśli moment obrotowy i prędkość mieszczą się w granicach podanych na tabliczce znamionowej.
Wybór napięcia często zależy od dostępnego źródła zasilania, a nie od preferencji silnika, ale zrozumienie typowych przypadków użycia dla każdego poziomu napięcia pomaga szybko zawęzić opcje.
Właściwy wybór silnika za pierwszym razem pozwala uniknąć kosztownych przeprojektowań i awarii w terenie. Postępuj zgodnie z tymi praktycznymi ramami:
Oblicz moment obrotowy wymagany w Twoim zastosowaniu na wale wyjściowym. W przypadku robota kołowego oznacza to obliczenie siły potrzebnej do przyspieszenia masy robota, pokonania tarcia tocznego i pokonania wszelkich wzniesień oczekiwanych podczas pracy. W przypadku siłownika liniowego oblicz siłę działającą na śrubę pociągową i przelicz ją na moment obrotowy silnika na podstawie skoku śruby i wydajności. Dodaj margines bezpieczeństwa 25–50%, aby uwzględnić zmiany tarcia, starzenie się i najgorsze scenariusze obciążenia. Ta docelowa wartość momentu obrotowego — z zastosowanym marginesem — staje się specyfikacją minimalnego znamionowego momentu obrotowego.
Ustal minimalną i maksymalną prędkość wału wyjściowego potrzebną dla Twojego zastosowania. Przenośnik przesuwający produkt z prędkością 0,5 m/s za pomocą rolki napędowej o średnicy 50 mm wymaga prędkości wyjściowej około 191 obr./min (0,5 / (π × 0,05) × 60). Wybierz silnik, którego prędkość bez obciążenia jest co najmniej 15–20% wyższa od wymaganej prędkości pod obciążeniem, aby mieć pewność, że w normalnych warunkach silnik nie pracuje w pobliżu przeciągnięcia.
Skorzystaj z poniższego przewodnika decyzyjnego, aby dopasować typ skrzyni biegów do wymagań aplikacji:
Sprawdź, czy zasilacz może zapewnić szczytowe zapotrzebowanie prądu silnika w momencie utknięcia. Prąd utyku w przypadku szczotkowego silnika z przekładnią prądu stałego jest zwykle 5–10 razy większy od prądu jałowego. Jeśli zasilacz nie może przejściowo dostarczać tego prądu podczas rozruchu lub zacięcia, dodaj sterownik silnika ograniczający prąd z regulowanym ograniczeniem prądu lub wybierz sterownik silnika z odpowiednim zapasem mocy. W przypadku bezszczotkowych motoreduktorów prądu stałego należy potwierdzić, że znamionowy prąd ciągły i szczytowy sterownika BLDC przekracza wymagania silnika z marginesem co najmniej 20%.
Standardowe motoreduktory prądu stałego nie są uszczelnione. Jeśli silnik będzie narażony na działanie kurzu, wilgoci, rozprysków płynu chłodzącego lub zmywania, wybierz jednostkę o stopniu ochrony IP — IP54 dla ochrony przed kurzem i rozpryskami, IP65 lub IP67 dla bardziej wymagających środowisk. W przypadku zastosowań w przemyśle spożywczym, farmaceutycznym lub morskim należy sprawdzić, czy smar do skrzyni biegów spełnia obowiązujące wymagania prawne (np. smar NSF H1 dopuszczony do kontaktu z żywnością do stref kontaktu z żywnością). Ważny jest także zakres temperatur pracy: standardowe silniki są przystosowane do pracy w temperaturze otoczenia 0–40°C; w przypadku magazynów chłodniczych lub instalacji zewnętrznych w klimacie północnym należy sprawdzić specyfikacje smaru niskotemperaturowego i wartości znamionowe temperatury uzwojenia.
Motoreduktory prądu stałego występują w ogromnej gamie produktów i systemów. Zrozumienie, gdzie są one powszechnie stosowane, pomaga zidentyfikować odpowiednie projekty referencyjne i zatwierdzone konfiguracje.
| Przemysł | Zastosowanie | Typowy typ silnika przekładniowego |
| Robotyka i pojazdy AGV | Koła napędowe, uruchamianie przegubów, mechanizmy chwytakowe | Planetarny bezszczotkowy, 24 V–48 V |
| Automatyka przemysłowa | Przenośniki, stoły indeksujące, siłowniki zaworów | Spiralny, ślimakowy lub planetarny, 24 V |
| Urządzenia medyczne | Pompy infuzyjne, narzędzia chirurgiczne, łóżka szpitalne | Bezszczotkowa planetarna, o niskim luzie, 12 V–24 V |
| Motoryzacja | Elektryczne szyby, regulacja siedzeń, napędy szyberdachu | Szczotkowany robak lub ostroga, 12V |
| Elektronika użytkowa | Obrót/pochylenie kamery, siłowniki inteligentnego domu, drukarki | Szczotkowana ostroga, 5 V–12 V |
| Rolnictwo | Sterowanie zaworami nawadniającymi, mechanizmy wysiewające | Ślimak lub planetarka o stopniu ochrony IP, 12–24 V |
| Automatyka budynków | Przepustnice HVAC, siłowniki żaluzji, napędy drzwi | Bezszczotkowy spiralny lub ślimakowy, 24V |
Motoreduktory prądu stałego doskonale nadają się do pracy ze zmienną prędkością, ponieważ prędkość silnika prądu stałego jest wprost proporcjonalna do przyłożonego napięcia. W praktyce prędkość kontrolowana jest jedną z trzech metod.
PWM to standardowa metoda sterowania szczotkowymi motoreduktorami prądu stałego z mikrokontrolerów, sterowników PLC i układów scalonych sterowników silników. Sterownik włącza i wyłącza zasilanie silnika ze stałą częstotliwością — zwykle 1–20 kHz — a cykl pracy (procent czasu, przez który zasilanie jest włączone) określa średnie napięcie, a tym samym prędkość. Cykl pracy wynoszący 50% przy napięciu 12 V zapewnia napięcie odpowiadające silnikowi w przybliżeniu 6 V. Sterowanie PWM jest wydajne, ponieważ tranzystory przełączające spędzają większość czasu na całkowitym włączeniu lub całkowitym wyłączeniu, minimalizując straty rezystancyjne. Częstotliwości PWM poniżej 1 kHz mogą powodować słyszalny pisk silnika, gdy uzwojenia twornika wibrują przy częstotliwości przełączania; częstotliwości powyżej 20 kHz wypychają je powyżej zakresu słyszalnego. W przypadku szczotkowych motoreduktorów prądu stałego częstym praktycznym wyborem jest częstotliwość PWM wynosząca 10–20 kHz.
W zastosowaniach wymagających precyzyjnej, stałej prędkości niezależnie od zmian obciążenia – platformy robotyczne, napędy taśmowe, precyzyjne dozowanie – enkoder obrotowy zamontowany na wale silnika lub wyjściu skrzyni biegów zapewnia sprzężenie zwrotne prędkości w czasie rzeczywistym do kontrolera PID. Sterownik porównuje rzeczywistą prędkość z wartością zadaną i dostosowuje cykl pracy PWM, aby to skompensować. Enkodery do motoreduktorów prądu stałego to zazwyczaj kwadraturowe optyczne lub magnetyczne typy z efektem Halla, o rozdzielczości od 6 do kilku tysięcy zliczeń na obrót, w zależności od wymagań dotyczących precyzji. Wielu dostawców motoreduktorów prądu stałego oferuje opcje zintegrowanych enkoderów jako standardowe pozycje katalogowe, co znacznie upraszcza integrację sprzętu.
W prostych systemach, w których obciążenie jest względnie stałe, a dokładność prędkości nie jest krytyczna, prędkość można ustawić poprzez regulację napięcia zasilania za pomocą zasilacza o zmiennym napięciu prądu stałego lub liniowego regulatora napięcia. To podejście jest najmniej wydajne — regulator liniowy rozprasza spadek napięcia w postaci ciepła — i nie zapewnia kompensacji obciążenia, ale jest najprostszą realizacją i jest odpowiednie dla stanowisk testowych, ręcznej regulacji prędkości i zastosowań o bardzo małej mocy, gdzie rozpraszanie ciepła w regulatorze nie stanowi problemu.
Zrozumienie przyczyn, które ostatecznie powodują awarię motoreduktora prądu stałego, pomaga zaprojektować systemy wydłużające okresy międzyobsługowe i wychwytujące problemy, zanim spowodują nieplanowane przestoje.
Twój adres e-mail nie zostanie opublikowany. Wymagane pola są zaznaczone *
Prawa autorskie © Zhejiang Dongzheng Motor Co., Ltd. Wszelkie prawa zastrzeżone.
 Producenci silników z przekładnią prądu stałego
Producenci silników z przekładnią prądu stałego